弹簧电子万能试验机系统工作原理:
2014-07-11 08:22:48 来源:
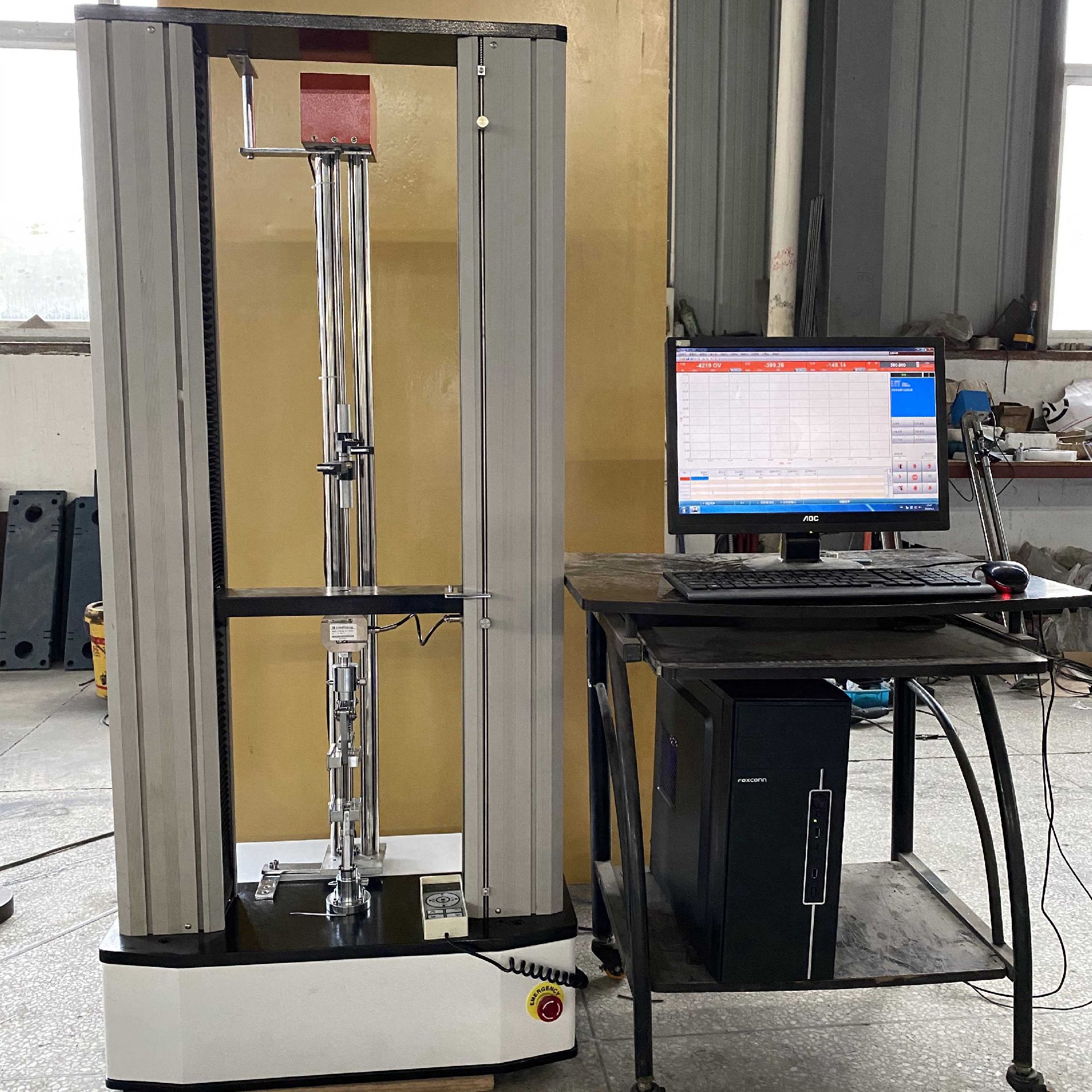
弹簧电子万能试验机系统主要由三个部分构成:运动模块、测量模块和控制模块。
弹簧电子万能试验机的运动模块主要由步进电机、联轴器、丝杠螺母以及横梁夹具等组成。其工作原理如下:步进电机通过联轴器带动滚珠丝杠转动,由丝杠螺母传动驱动横梁作直线运动,并利用夹具实现对试件的拉伸压缩。其中电机采用直联的方式,省略了减速箱部分,这样在保证输出力矩和步距精度的前提下,减小了齿隙、空回所带来的影响。丝杠螺母传动选用滚珠丝杠螺母副,提高了传动效率,减小了因摩擦造成的位置精度的误差。
弹簧电子万能试验机测量模块主要由位移传感器、称重传感器、引伸计、放大器以及AD采集卡等构成。步进电机多用于开环控制,但为了提高试验机的精度,研究中;利用位移传感器对其进行位置闭环控制,用来对开环控制定位误差进行有效的校正与补偿。称重传感器和引伸计分别将拉伸过程中的作用力和变形量转变为微弱的电压信号,经过放大器放大后,通过AD采集卡传递给上位机,上位机进行实时数据处理。
弹簧电子万能试验机控制模块主要由上位PC机、电机控制卡和细分驱动器等组成。上位机将采集的数据进行处理后,给电机控制卡发送位置、速度和加速就指令;电机控制卡按照接收到的指令,产生相应的脉冲信号;细分驱动器依据产生的脉冲信号,使步进电机实现平稳运转。
 扫一扫,手机浏览
扫一扫,手机浏览